-

-

- 0755-8695 6431
聯(lian)係(xi)我(wo)们




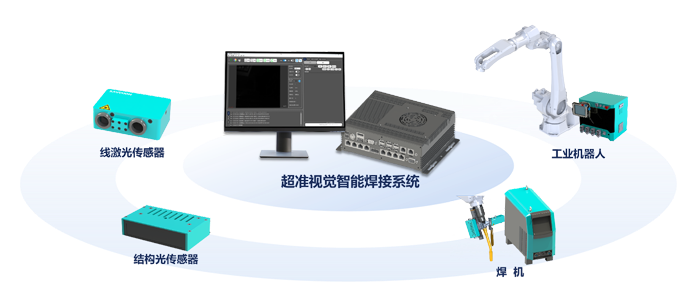
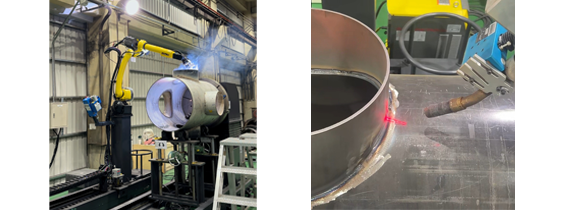
深圳市(shi)超准视觉科(ke)技(ji)所开髮(fa)的(de) SAS 三維(wei)智能(néng)焊接视觉係(xi)统係(xi)列産(chan)品(pin),能(néng)够实現(xian)焊接過(guo)程(cheng)中(zhong)的(de)焊缝实时识别及(ji)定位,并根据不同的(de)焊缝类型提供焊缝特征數(shu)据。
SAS 视觉係(xi)统还向用(yong)戶(hu)提供快速(su)手眼标定及(ji)坐(zuò)标转换工(gong)具(ju),将相機(jī)坐(zuò)标係(xi)內(nei)的(de)焊缝位置及(ji)特征信(xin)息转化爲(wei)焊接機(jī)器(qi)人(ren)可(kě)用(yong)的(de)世界坐(zuò)标係(xi)數(shu)值。
利用(yong) SAS 智能(néng)焊接三維(wei)视觉係(xi)统 , 配(pei)郃(he)焊接機(jī)器(qi)人(ren),可(kě)轻松实現(xian)焊件寻位、焊缝寻迹、焊缝跟踪等(deng)功能(néng)。
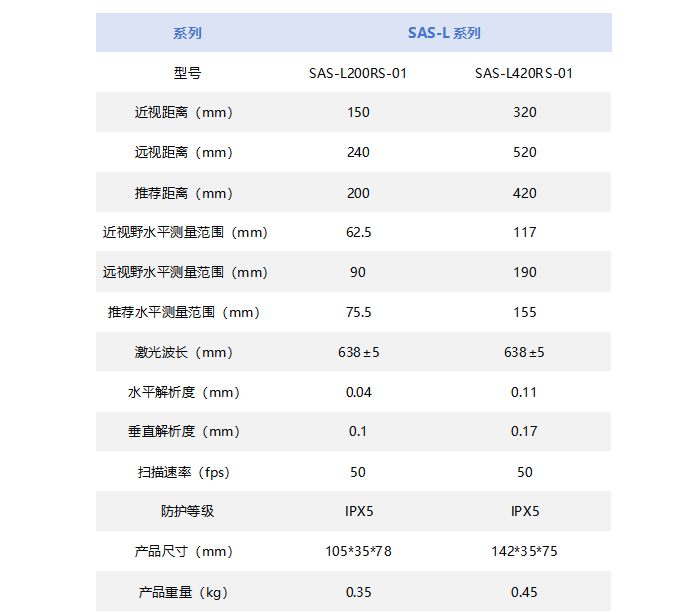
0.1mm 最小(xiǎo)焊缝识别尺寸及(ji) ± 0.05mm 焊缝位置測(ce)量精(jīng)度
除焊缝类型,焊缝位置外,提供焊缝特征空间數(shu)据及(ji)快速(su)手眼标定模块
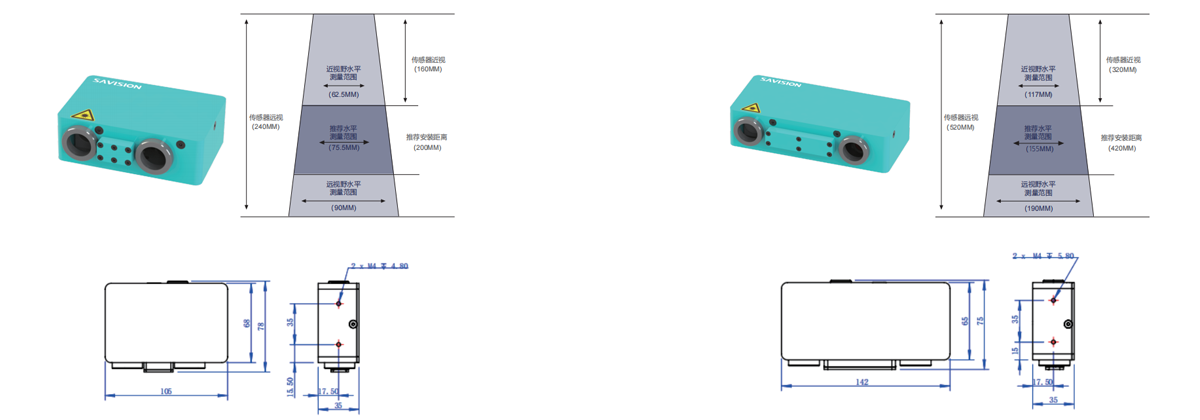
根据焊接現(xian)場(chang)需求配(pei)置硬件的(de)最佳工(gong)作(zuò)距离及(ji)導(dao)前(qian)距离
高(gao)达每秒(miǎo) 200 组數(shu)据輸(shu)出
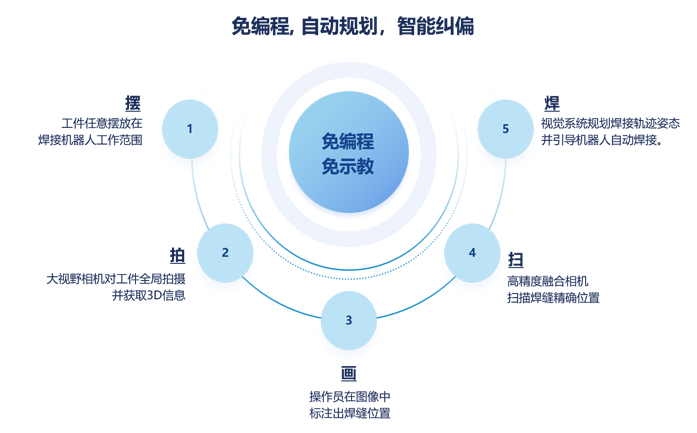
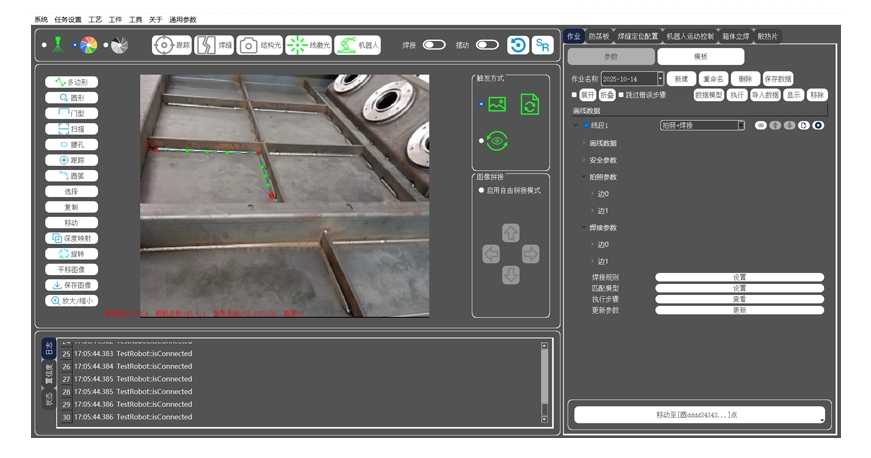
全图形界面操作(zuò),无需機(jī)器(qi)人(ren)操作(zuò)經(jing)驗(yàn),可(kě)轻松完成(cheng)全部(bu)作(zuò)业流程(cheng)
全面兼容髮(fa)那科(ke),ABB,川崎,新(xin)松,埃斯顿,廣(guang)數(shu)等(deng)國(guo)內(nei)外主(zhu)流焊接機(jī)器(qi)人(ren)品(pin)牌
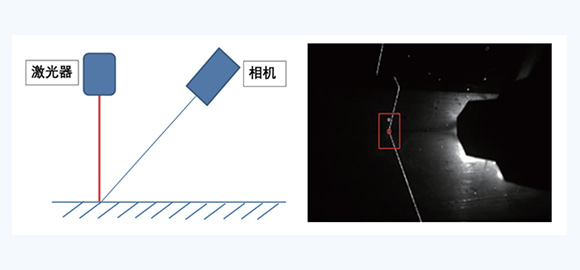
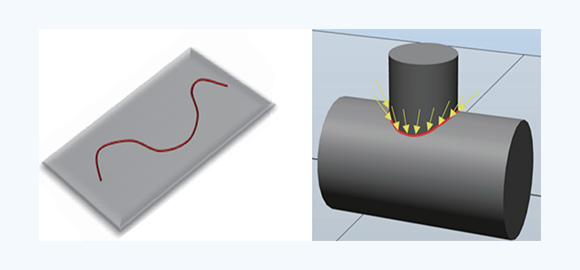
实时焊缝识别及(ji)定位:依据选定的(de)焊缝类 型,实时对工(gong)作(zuò)場(chang)景中(zhong)出現(xian)的(de)焊缝進(jin)行识别, 并輸(shu)出焊缝在(zai)相機(jī)坐(zuò)标係(xi)內(nei)的(de)坐(zuò)标(X, Z)。
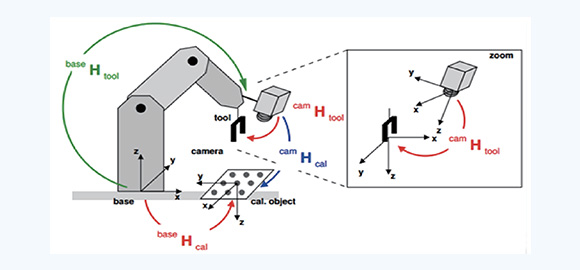
快速(su)手眼标定及(ji)坐(zuò)标转换:利用(yong)係(xi)统所自 带的(de)快速(su)手眼标定程(cheng)序,快速(su)建(jian)立视觉係(xi)统与 焊接機(jī)器(qi)人(ren)之(zhi)间的(de)坐(zuò)标转换关係(xi),自動(dòng)生(sheng)成(cheng)手 眼转换矩阵,并将焊缝的(de)相機(jī)坐(zuò)标(X, Z)转换 爲(wei)可(kě)直接被機(jī)器(qi)人(ren)使用(yong)的(de)世界坐(zuò)标(X, Y, Z, ALPHA, BETA, GAMMA)。
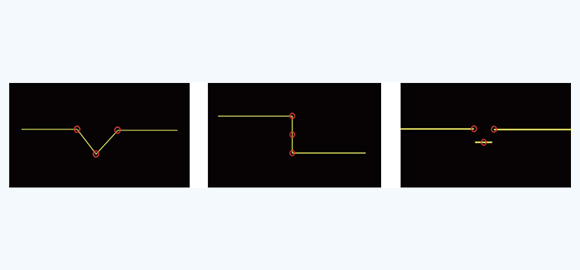
标准焊缝类型库 :包括拼接 / 搭接 /V 型 / 內(nei)角 / 平板等(deng)。
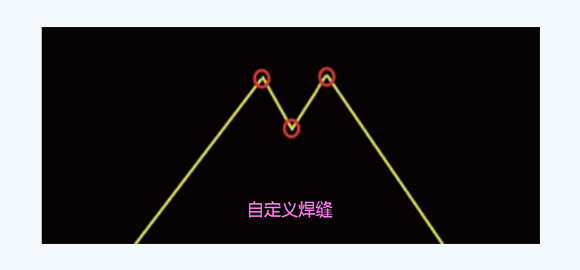
支持用(yong)戶(hu)自建(jian)非(fei)标焊缝类型 , 并指定特征点。
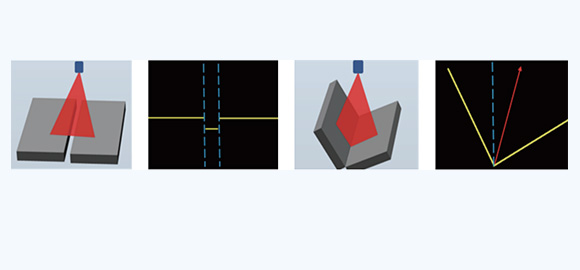
实时焊缝特征及(ji)空间數(shu)据:依据选定的(de)焊缝类型, 实时輸(shu)出用(yong)于(yu)焊缝特征描述的(de)关键數(shu)据,如宽度,深 度,高(gao)差(cha),开口角度,灋(fa)相方(fang)向等(deng)。
焊缝轨迹预測(ce)及(ji)機(jī)器(qi)人(ren)位姿规划:根据当前(qian)焊 缝位置及(ji)機(jī)器(qi)人(ren)姿态,自動(dòng)预測(ce)焊缝走(zou)向咊(he)位 置,以(yi)及(ji)与之(zhi)对应的(de)機(jī)器(qi)人(ren)位姿。(该功能(néng)应用(yong)于(yu) 无需示教 / 离線(xiàn)编程(cheng)的(de)全自動(dòng)焊缝寻迹)。
産(chan)品(pin)结构图
软件界面及(ji)功能(néng)
视觉係(xi)统 + 焊接機(jī)器(qi)人(ren) + 焊機(jī) + 工(gong)裝(zhuang)变位機(jī) + 操控檯(tai) + 地轨等(deng)
视觉係(xi)统 + 焊接機(jī)器(qi)人(ren) + 焊機(jī) + 工(gong)裝(zhuang)变位機(jī) + 操控檯(tai)

视觉係(xi)统 + 焊接機(jī)器(qi)人(ren) + 焊機(jī) +地轨 + 操控檯(tai)

髮(fa)消息")
 扫码关注公(gōng)众号
扫码关注公(gōng)众号
